La Dirección General de Orientación y Atención Educativa (DGOAE) ofreció la videoconferencia La robótica como opción profesional, la cual estuvo a cargo de Jesús Savage Carmona, quien platicó que en 2006, cuando asistió por primera vez al Robocup, en Alemania, se dio cuenta que no había otro país latinoamericano compitiendo más que México, y a su regreso, buscó el apoyo para que se participara, de manera regular, en este tipo de concursos internacionales.
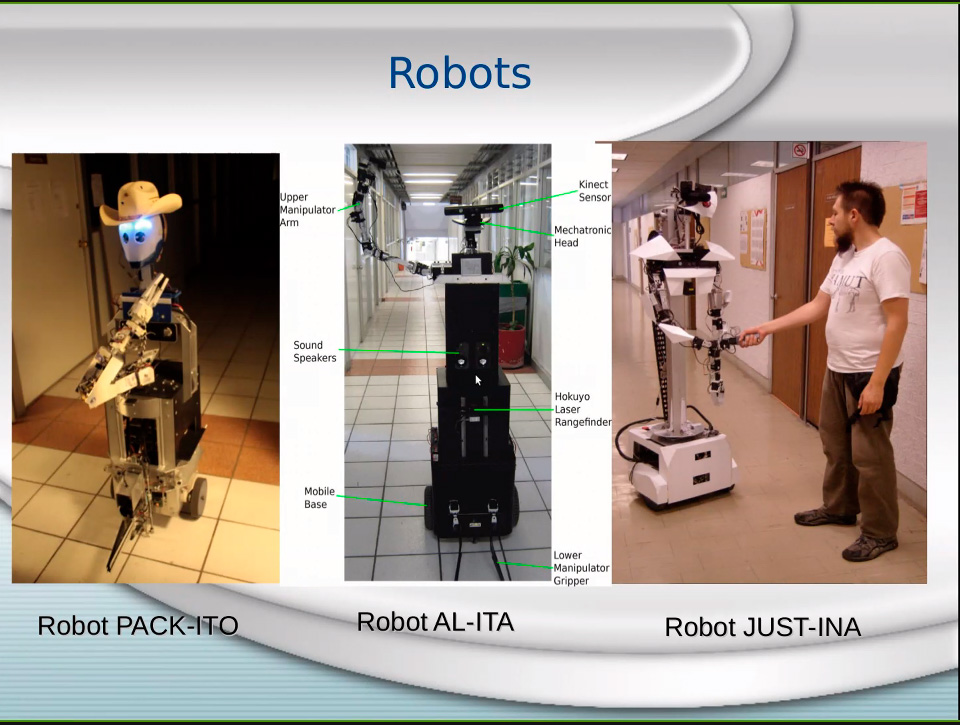
El catedrático de la Facultad de Ingeniería compartió que le motivó mucho leer en el CCH Crónicas Marcianas, de Ray Bradbury, y la materia de Cibernética y Computación para decidirse a estudiar robótica. “Después de un doctorado en Washington, me incorporé a la UNAM, en 1997 pudimos comprar nuestro primer robot TX8; un segundo, el TPR8 lo hicimos junto con la Universidad de Michoacán, y luego empezamos a producir nuestros propios robots”, recordó.
“Hemos participado en el Robocup y afortunadamente en los últimos dos años hemos obtenido medalla de plata. En Estados Unidos hay un financiamiento de 24 mil millones de dólares al año; en Europa 2 mil 800 millones de euros, de éstos, 700 millones vienen de la iniciativa privada, y en México ¿cuánto?”, se cuestionó.
“Corea hace 40 años tenía más o menos la misma capacidad económica de México y ahora nos lleva una ventaja muy grande. ¿Qué fue lo que pasó? Pues que ellos comenzaron a trabajar para desarrollar estos productos. China, Corea, Singapur, Taiwán, Hong Kong y Japón piensan en proyectos a largo plazo, y ese es un problema, que no sólo al gobierno le corresponde arreglar sino a empresas privadas y a las universidades”.
A lo largo de su ponencia el catedrático mencionó algunos modelos utilizados para diseñar robots, como el basado en el comportamiento de insectos, llamado Modelo reactivo, “son comportamientos que funcionan en paralelo, por ejemplo, en una colonia de hormigas cada una está especializada, la exploradora busca dónde está el alimento, una vez que lo encuentra regresa para avisarle a las otras.
“En el camino dejan una sustancia química, continua, que después otras hormigas rastrearán para encontrar la comida, éstas son las recolectoras, por lo general llevan hojas adentro del nido, estos comportamientos los podemos emular en computadoras o robots utilizando algoritmos.
“En el nido las llevan a un lugar húmedo, otras hormigas realizan la función de agricultoras, dejan que a las hojas les crezcan hongos que darán de comer a otros insectos, que los cuidan otras hormigas, que hacen el papel de ganaderas, el excremento de estos insectos es la comida de las hormigas, y por último tendríamos a la reina, que su única función es poner huevos”, agregó.
El comportamiento de las hormigas y todo el nido en su conjunto, dijo, no tienen una representación del medio ambiente, este tipo de conductas se pueden diseñar usando algo que se llama lógica de orden cero.
“Vamos a suponer que un robot está viendo hacia el frente y una fuente luminosa le indica adonde llegar, pero con sus sensores detecta que hay obstáculos al frente y a su derecha, una estrategia podría ser que el robot gire hacia la izquierda y avance, esos se llaman comportamientos de lógica de orden cero”, concluyó.